|
EEROS
1.0.0.0
API for the EEROS Real-Time Robotics Framework
|
|
EEROS
1.0.0.0
API for the EEROS Real-Time Robotics Framework
|
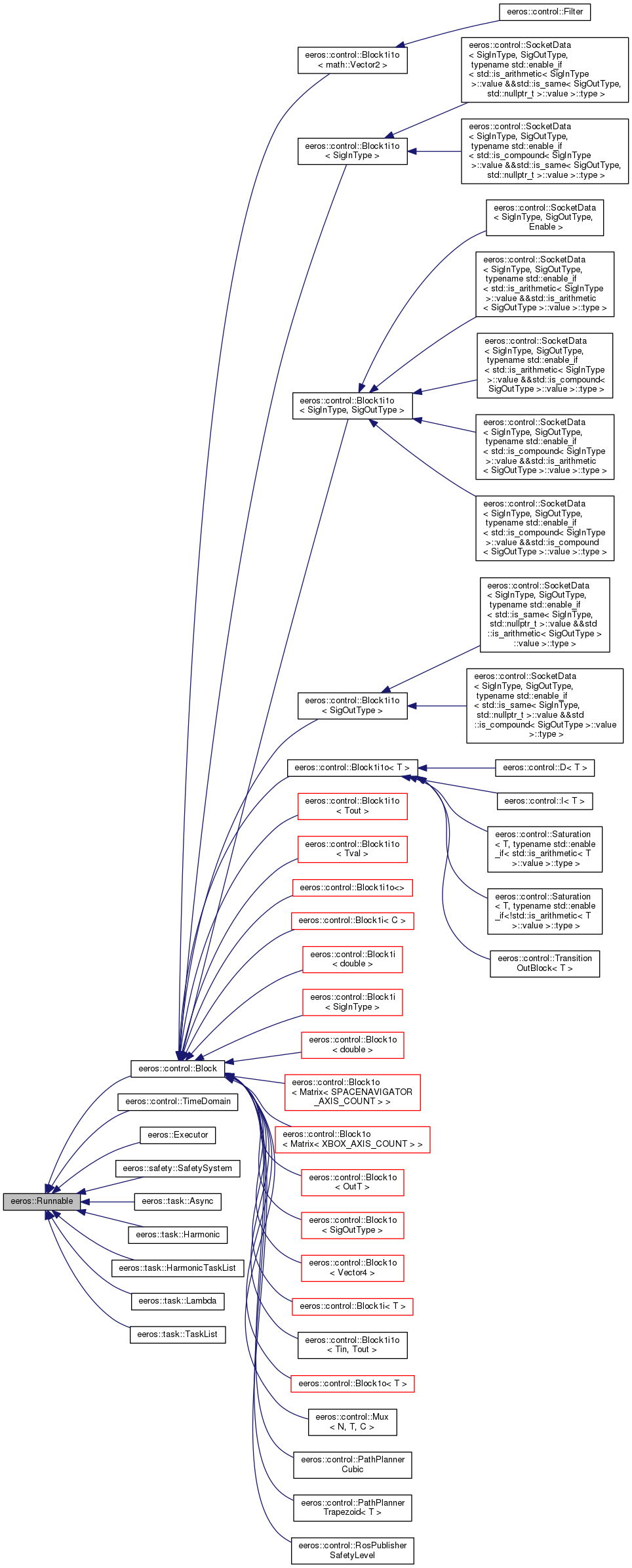
#include <Runnable.hpp>
Public Member Functions | |
| virtual | ~Runnable () |
| virtual void | run ()=0 |
|
virtual |
|
pure virtual |
Implemented in eeros::control::SocketData< SigInType, SigOutType, typename std::enable_if< std::is_same< SigInType, std::nullptr_t >::value &&std::is_arithmetic< SigOutType >::value >::type >, eeros::control::SocketData< SigInType, SigOutType, typename std::enable_if< std::is_arithmetic< SigInType >::value &&std::is_same< SigOutType, std::nullptr_t >::value >::type >, eeros::control::SocketData< SigInType, SigOutType, typename std::enable_if< std::is_same< SigInType, std::nullptr_t >::value &&std::is_compound< SigOutType >::value >::type >, eeros::control::SocketData< SigInType, SigOutType, typename std::enable_if< std::is_compound< SigInType >::value &&std::is_same< SigOutType, std::nullptr_t >::value >::type >, eeros::control::PathPlannerTrapezoid< T >, eeros::control::SocketData< SigInType, SigOutType, typename std::enable_if< std::is_arithmetic< SigInType >::value &&std::is_arithmetic< SigOutType >::value >::type >, eeros::control::SocketData< SigInType, SigOutType, typename std::enable_if< std::is_compound< SigInType >::value &&std::is_arithmetic< SigOutType >::value >::type >, eeros::control::Gain< Tout, Tgain, elementWise >, eeros::control::SocketData< SigInType, SigOutType, typename std::enable_if< std::is_arithmetic< SigInType >::value &&std::is_compound< SigOutType >::value >::type >, eeros::control::Saturation< T, typename std::enable_if< std::is_arithmetic< T >::value >::type >, eeros::control::MAFilter< N, Tval, Tcoeff >, eeros::control::MedianFilter< N, Tval >, eeros::control::ZTransferFunction< ORDER >, eeros::safety::SafetySystem, eeros::control::TransitionOutBlock< T >, eeros::Executor, eeros::control::RosSubscriber< TRosMsg, SigOutType >, eeros::control::RosSubscriber< std_msgs::Float64MultiArray::Type, SigOutType >, eeros::control::RosSubscriber< std_msgs::Float64::Type, double >, eeros::control::RosSubscriber< sensor_msgs::LaserScan::Type, double >, eeros::control::Saturation< T, typename std::enable_if<!std::is_arithmetic< T >::value >::type >, eeros::control::SocketData< SigInType, SigOutType, typename std::enable_if< std::is_compound< SigInType >::value &&std::is_compound< SigOutType >::value >::type >, eeros::control::TimeDomain, eeros::control::PathPlannerCubic, eeros::control::RosPublisherSafetyLevel, eeros::control::KeyboardInput, eeros::control::RosPublisher< TRosMsg, SigInType >, eeros::control::RosPublisher< std_msgs::Float64::Type, double >, eeros::control::RosPublisher< sensor_msgs::LaserScan::Type, double >, eeros::control::RosPublisher< std_msgs::Float64MultiArray::Type, SigInType >, eeros::control::SignalChecker< T >, eeros::control::Trace< T >, eeros::control::MouseInput, eeros::control::PeripheralOutput< T >, eeros::control::SpaceNavigatorInput, eeros::control::Switch< N, T >, eeros::control::XBoxInput, eeros::control::DeMux< N, T, C >, eeros::control::Sum< N, T >, eeros::control::Constant< T >, eeros::control::Mux< N, T, C >, eeros::control::PeripheralInput< T >, eeros::control::TransitionInBlock< T >, eeros::control::Filter, eeros::control::Step< T >, eeros::task::Async, eeros::control::D< T >, eeros::control::Mul< In1T, In2T, OutT >, eeros::control::I< T >, eeros::task::Harmonic, eeros::task::Lambda, eeros::task::HarmonicTaskList, and eeros::task::TaskList.
 1.8.11
1.8.11 
