|
EEROS
1.0.0.0
API for the EEROS Real-Time Robotics Framework
|
|
EEROS
1.0.0.0
API for the EEROS Real-Time Robotics Framework
|
#include <Executor.hpp>
Public Member Functions | |
| virtual | ~Executor () |
| void | setMainTask (task::Periodic &mainTask) |
| void | setMainTask (safety::SafetySystem &mainTask) |
| task::Periodic * | getMainTask () |
| void | add (task::Periodic &task) |
| void | add (control::TimeDomain &timedomain) |
| virtual void | run () |
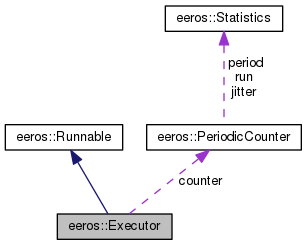
 Public Member Functions inherited from eeros::Runnable Public Member Functions inherited from eeros::Runnable | |
| virtual | ~Runnable () |
Static Public Member Functions | |
| static Executor & | instance () |
| static void | prefault_stack () |
| static bool | lock_memory () |
| static bool | set_priority (int nice) |
| static void | stop () |
Public Attributes | |
| PeriodicCounter | counter |
Static Public Attributes | |
| static constexpr int | basePriority = 49 |
|
virtual |
| void Executor::add | ( | task::Periodic & | task | ) |
| void Executor::add | ( | control::TimeDomain & | timedomain | ) |
| task::Periodic * Executor::getMainTask | ( | ) |
|
static |
|
static |
|
static |
|
virtual |
Implements eeros::Runnable.
|
static |
| void Executor::setMainTask | ( | task::Periodic & | mainTask | ) |
| void Executor::setMainTask | ( | safety::SafetySystem & | mainTask | ) |
|
static |
|
static |
| PeriodicCounter eeros::Executor::counter |
 1.8.11
1.8.11 
