|
EEROS
0.4.1.0
API for the EEROS Real-Time Robotics Framework
|
|
EEROS
0.4.1.0
API for the EEROS Real-Time Robotics Framework
|
#include <SequenceA.hpp>
Public Member Functions | |
| SequenceA (std::string name, eeros::safety::SafetySystem &safetySys, MyControlSystem &controlSys, double angle) | |
| virtual bool | checkPreCondition () |
| virtual bool | checkPostCondition () |
| virtual void | init () |
| virtual void | exit () |
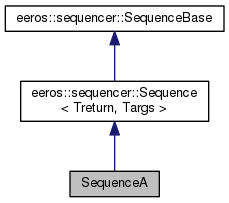
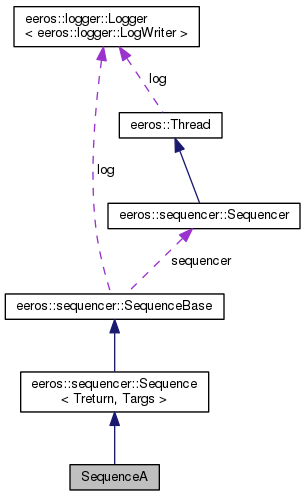
 Public Member Functions inherited from eeros::sequencer::Sequence< Treturn, Targs > Public Member Functions inherited from eeros::sequencer::Sequence< Treturn, Targs > | |
| Sequence (std::string name, Sequencer *sequencer) | |
| SequenceResult< Treturn > | operator() (Targs...args) |
| Public Member Functions inherited from eeros::sequencer::SequenceBase | |
| SequenceBase (std::string name, Sequencer *sequencer) | |
| virtual std::string | getName () const |
Additional Inherited Members | |
| Protected Member Functions inherited from eeros::sequencer::Sequence< Treturn, Targs > | |
| virtual Treturn | run (Targs...args) |
| Protected Member Functions inherited from eeros::sequencer::SequenceBase | |
| virtual void | yield () |
| Protected Attributes inherited from eeros::sequencer::SequenceBase | |
| eeros::logger::Logger < eeros::logger::LogWriter > | log |
| std::string | name |
| Sequencer * | sequencer |
| SequenceA::SequenceA | ( | std::string | name, |
| eeros::safety::SafetySystem & | safetySys, | ||
| MyControlSystem & | controlSys, | ||
| double | angle | ||
| ) |

|
virtual |
|
virtual |
|
virtual |
|
virtual |
 1.8.6
1.8.6