|
EEROS
0.4.1.0
API for the EEROS Real-Time Robotics Framework
|
|
EEROS
0.4.1.0
API for the EEROS Real-Time Robotics Framework
|
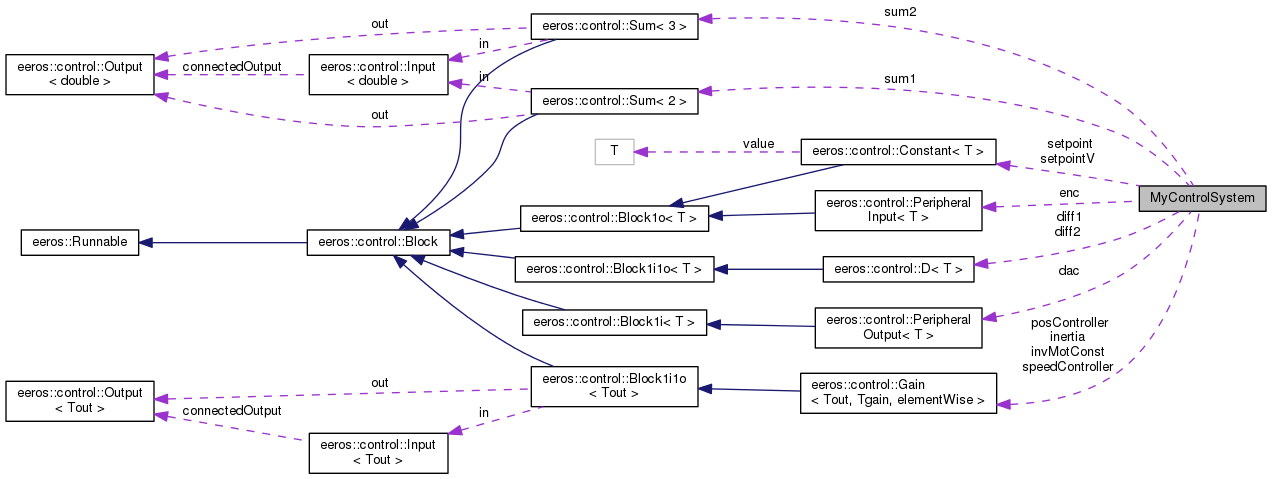
#include <MyControlSystem.hpp>
Public Member Functions | |
| MyControlSystem (double ts) | |
| void | start () |
| void | stop () |
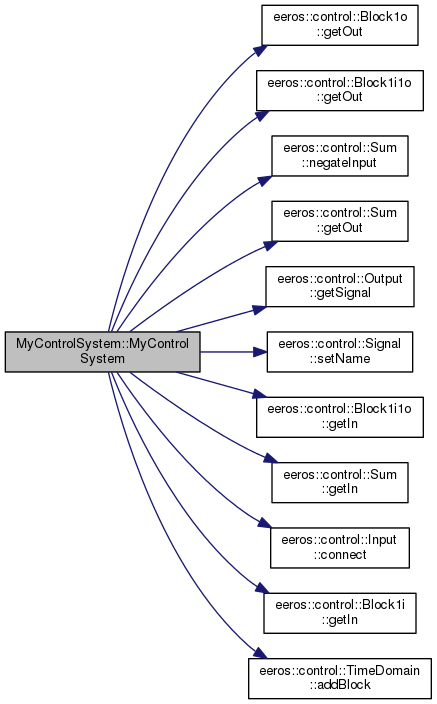
| MyControlSystem::MyControlSystem | ( | double | ts | ) |
| void MyControlSystem::start | ( | ) |


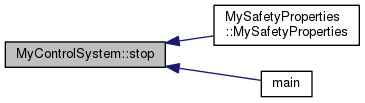
| void MyControlSystem::stop | ( | ) |

| eeros::control::PeripheralOutput MyControlSystem::dac |
| eeros::control::D MyControlSystem::diff1 |
| eeros::control::D MyControlSystem::diff2 |
| eeros::control::PeripheralInput MyControlSystem::enc |
| eeros::control::Gain MyControlSystem::inertia |
| eeros::control::Gain MyControlSystem::invMotConst |
| eeros::control::Gain MyControlSystem::posController |
| eeros::control::Constant MyControlSystem::setpoint |
| eeros::control::Constant MyControlSystem::setpointV |
| eeros::control::Gain MyControlSystem::speedController |
| eeros::control::Sum<2> MyControlSystem::sum1 |
| eeros::control::Sum<3> MyControlSystem::sum2 |
 1.8.6
1.8.6 
