|
EEROS
1.0.0.0
API for the EEROS Real-Time Robotics Framework
|
|
EEROS
1.0.0.0
API for the EEROS Real-Time Robotics Framework
|
#include <RosPublisherDoubleArray.hpp>
Public Member Functions | |
| RosPublisherDoubleArray (const std::string &topic, const uint32_t queueSize=1000) | |
| void | setRosMsg (TRosMsg &msg) |
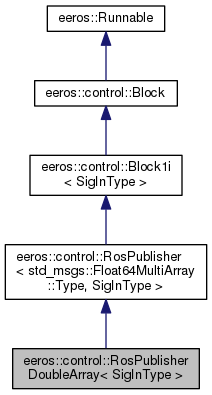
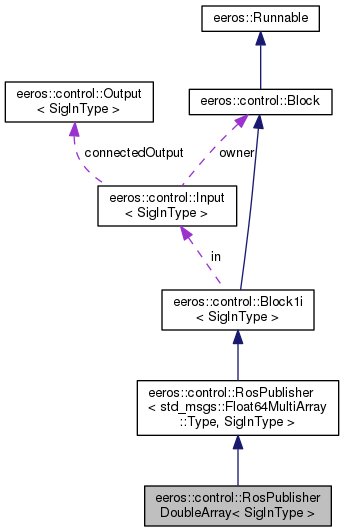
 Public Member Functions inherited from eeros::control::RosPublisher< std_msgs::Float64MultiArray::Type, SigInType > Public Member Functions inherited from eeros::control::RosPublisher< std_msgs::Float64MultiArray::Type, SigInType > | |
| RosPublisher (const std::string &topic, uint32_t queueSize=1000, bool callNewest=false) | |
| void | run () |
| Public Member Functions inherited from eeros::control::Block1i< SigInType > | |
| Block1i () | |
| virtual Input< SigInType > & | getIn () |
| Public Member Functions inherited from eeros::control::Block | |
| virtual void | setName (std::string name) |
| virtual std::string | getName () |
| Public Member Functions inherited from eeros::Runnable | |
| virtual | ~Runnable () |
Additional Inherited Members | |
| Protected Attributes inherited from eeros::control::RosPublisher< std_msgs::Float64MultiArray::Type, SigInType > | |
| ros::Publisher | publisher |
| const std::string & | topic |
| std_msgs::Float64MultiArray::Type | msg |
| Protected Attributes inherited from eeros::control::Block1i< SigInType > | |
| Input< SigInType > | in |
|
inline |
|
inlinevirtual |
 1.8.11
1.8.11 
