|
EEROS
0.4.1.0
API for the EEROS Real-Time Robotics Framework
|
|
EEROS
0.4.1.0
API for the EEROS Real-Time Robotics Framework
|
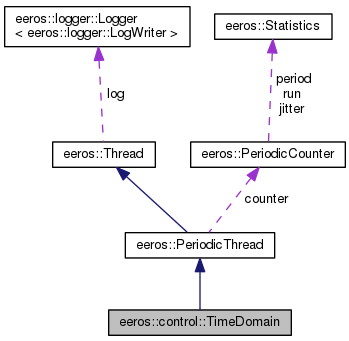
#include <TimeDomain.hpp>
Public Member Functions | |
| TimeDomain (std::string name, double period, bool realtime) | |
| virtual void | addBlock (Runnable *block) |
 Public Member Functions inherited from eeros::PeriodicThread Public Member Functions inherited from eeros::PeriodicThread | |
| PeriodicThread (double period, double delay=0, bool realtime=false, status start=running, int priority=0) | |
| virtual | ~PeriodicThread () |
| virtual status | getStatus () const |
| virtual double | getPeriod () const |
| virtual void | start () |
| virtual void | pause () |
| virtual void | stop () |
| Public Member Functions inherited from eeros::Thread | |
| Thread () | |
| virtual | ~Thread () |
| virtual std::string | getId () const |
| virtual void | join () |
Protected Member Functions | |
| virtual void | run () |
| Protected Member Functions inherited from eeros::Thread | |
| Thread (std::function< void()> t) | |
Additional Inherited Members | |
| Public Types inherited from eeros::PeriodicThread | |
| enum | status { running = 0, stopping = 1, stopped = 2, paused = 3 } |
| Static Public Member Functions inherited from eeros::PeriodicThread | |
| static constexpr bool | isRealtimeSupported () |
| Public Attributes inherited from eeros::PeriodicThread | |
| PeriodicCounter | counter |
| Protected Attributes inherited from eeros::Thread | |
| std::thread | t |
| eeros::logger::Logger < eeros::logger::LogWriter > | log |
| TimeDomain::TimeDomain | ( | std::string | name, |
| double | period, | ||
| bool | realtime | ||
| ) |
|
virtual |
|
protectedvirtual |
Reimplemented from eeros::Thread.
 1.8.6
1.8.6 
