|
EEROS
0.4.1.0
API for the EEROS Real-Time Robotics Framework
|
|
EEROS
0.4.1.0
API for the EEROS Real-Time Robotics Framework
|
#include <iostream>#include <ostream>#include <fstream>#include <stdlib.h>#include <unistd.h>#include <eeros/hal/HAL.hpp>#include <eeros/hal/ComediFqd.hpp>#include <eeros/hal/ComediDac.hpp>#include <eeros/safety/SafetySystem.hpp>#include <eeros/hal/ComediDigIn.hpp>#include <eeros/hal/ComediDigOut.hpp>#include <eeros/logger/StreamLogWriter.hpp>#include <eeros/sequencer/Sequencer.hpp>#include "MySafetyProperties.hpp"#include "MyControlSystem.hpp"#include "SequenceA.hpp"
Functions | |
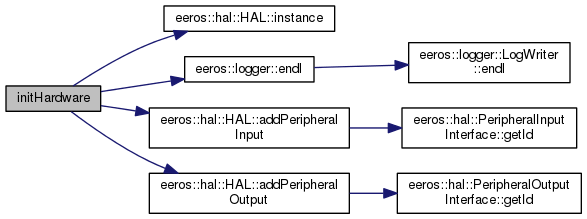
| void | initHardware () |
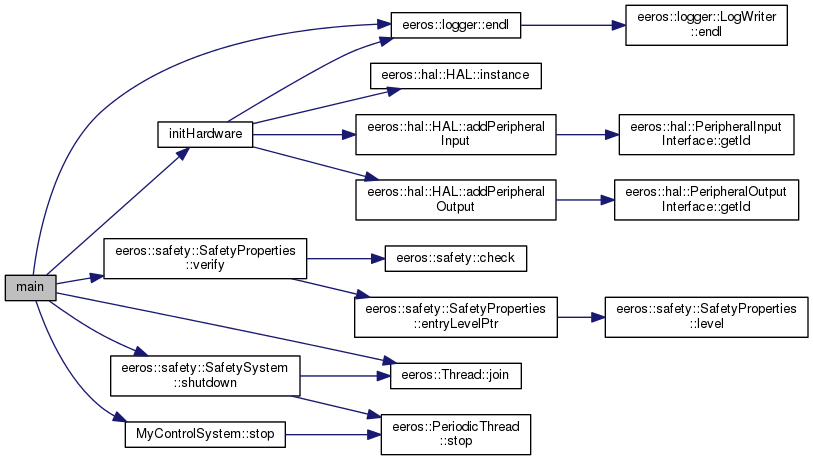
| int | main () |
| void initHardware | ( | ) |

| int main | ( | ) |
 1.8.6
1.8.6 
