|
EEROS
1.0.0.0
API for the EEROS Real-Time Robotics Framework
|
|
EEROS
1.0.0.0
API for the EEROS Real-Time Robotics Framework
|
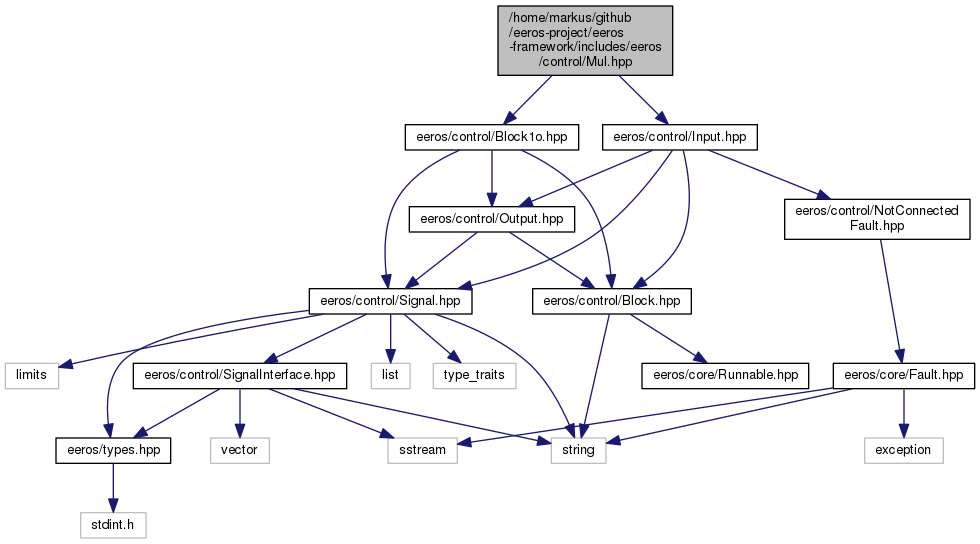
Go to the source code of this file.
Classes | |
| class | eeros::control::Mul< In1T, In2T, OutT > |
Namespaces | |
| eeros | |
| eeros::control | |
Functions | |
| template<typename In1T = double, typename In2T = double, typename OutT = double> | |
| std::ostream & | eeros::control::operator<< (std::ostream &os, Mul< In1T, In2T, OutT > &mul) |
 1.8.11
1.8.11 
