|
EEROS
1.0.0.0
API for the EEROS Real-Time Robotics Framework
|
|
EEROS
1.0.0.0
API for the EEROS Real-Time Robotics Framework
|
#include <ros/ros.h>#include <std_msgs/Header.h>
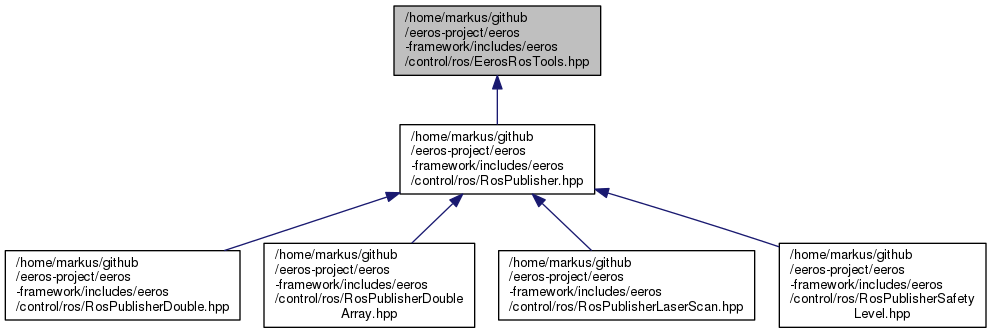
Go to the source code of this file.
Namespaces | |
| eeros | |
| eeros::control | |
| eeros::control::rosTools | |
Macros | |
| #define | NS_PER_SEC 1000000000 |
| #define NS_PER_SEC 1000000000 |
 1.8.11
1.8.11 
