|
EEROS
0.4.1.0
API for the EEROS Real-Time Robotics Framework
|
|
EEROS
0.4.1.0
API for the EEROS Real-Time Robotics Framework
|
#include <ConstantAccTrajectoryGenerator.hpp>
Public Types | |
| using | E = typename T::value_type |
Public Member Functions | |
| ConstantAccTrajectoryGenerator (T velMax, T accMax, T decMax, double dt) | |
| virtual bool | finished () |
| virtual std::array< T, 3 > | get (double dt) |
| virtual bool | push (std::array< T, 3 > start, std::array< T, 3 > end) |
| virtual void | reset (std::array< T, 3 > last) |
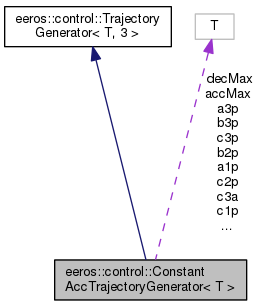
 Public Member Functions inherited from eeros::control::TrajectoryGenerator< T, 3 > Public Member Functions inherited from eeros::control::TrajectoryGenerator< T, 3 > | |
| TrajectoryGenerator () | |
| virtual bool | push (std::array< T, N > start, std::array< T, N > end)=0 |
| virtual bool | push (T end) |
| virtual bool | push (std::array< T, N > end) |
| virtual bool | push (T start, T end) |
| virtual void | reset (std::array< T, N > last)=0 |
Protected Attributes | |
| std::mutex | mtx |
| double | dt |
| T | velMax |
| T | accMax |
| T | decMax |
| double | dT1 |
| double | dT2 |
| double | dT3 |
| T | a1p |
| T | c1p |
| T | b1v |
| T | c1a |
| T | b2p |
| T | c2p |
| T | c2v |
| T | c2a |
| T | a3p |
| T | b3p |
| T | c3p |
| T | b3v |
| T | c3v |
| T | c3a |
| double | t |
| bool | finish |
| Protected Attributes inherited from eeros::control::TrajectoryGenerator< T, 3 > | |
| std::array< T, N > | last |
| using eeros::control::ConstantAccTrajectoryGenerator< T >::E = typename T::value_type |
|
inline |
|
inlinevirtual |
Implements eeros::control::TrajectoryGenerator< T, 3 >.
|
inlinevirtual |
|
inlinevirtual |

|
inlinevirtual |
|
protected |
|
protected |
|
protected |
|
protected |
|
protected |
|
protected |
|
protected |
|
protected |
|
protected |
|
protected |
|
protected |
|
protected |
|
protected |
|
protected |
|
protected |
|
protected |
|
protected |
|
protected |
|
protected |
|
protected |
|
protected |
|
protected |
|
protected |
|
protected |
 1.8.6
1.8.6 

