|
EEROS
1.0.0.0
API for the EEROS Real-Time Robotics Framework
|
|
EEROS
1.0.0.0
API for the EEROS Real-Time Robotics Framework
|
#include <eeros/control/PathPlannerCubic.hpp>#include <eeros/core/System.hpp>#include <iostream>#include <fstream>#include <unistd.h>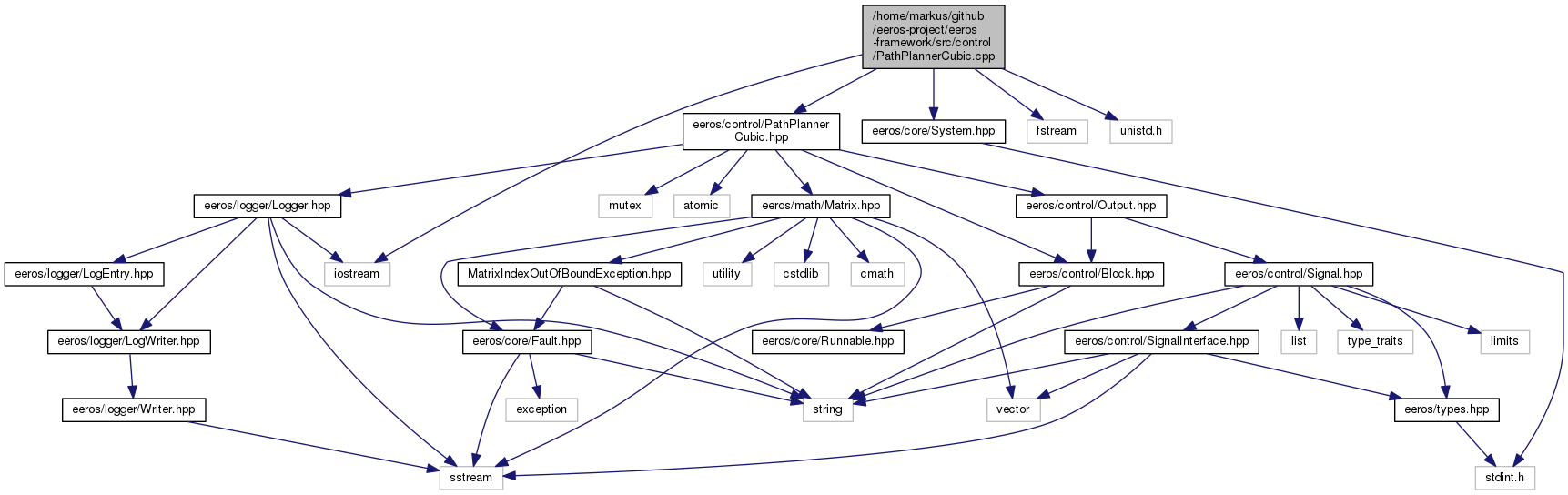
 1.8.11
1.8.11 
