|
EEROS
0.4.1.0
API for the EEROS Real-Time Robotics Framework
|
|
EEROS
0.4.1.0
API for the EEROS Real-Time Robotics Framework
|
#include <iostream>#include <ostream>#include <fstream>#include <stdlib.h>#include <unistd.h>#include <signal.h>#include <eeros/core/Executor.hpp>#include <eeros/core/SharedMemory.hpp>#include <eeros/control/Step.hpp>#include <eeros/control/Sum.hpp>#include <eeros/control/Gain.hpp>#include <eeros/control/D.hpp>#include <eeros/control/GlobalSignalProvider.hpp>#include <eeros/control/SignalBufferReader.hpp>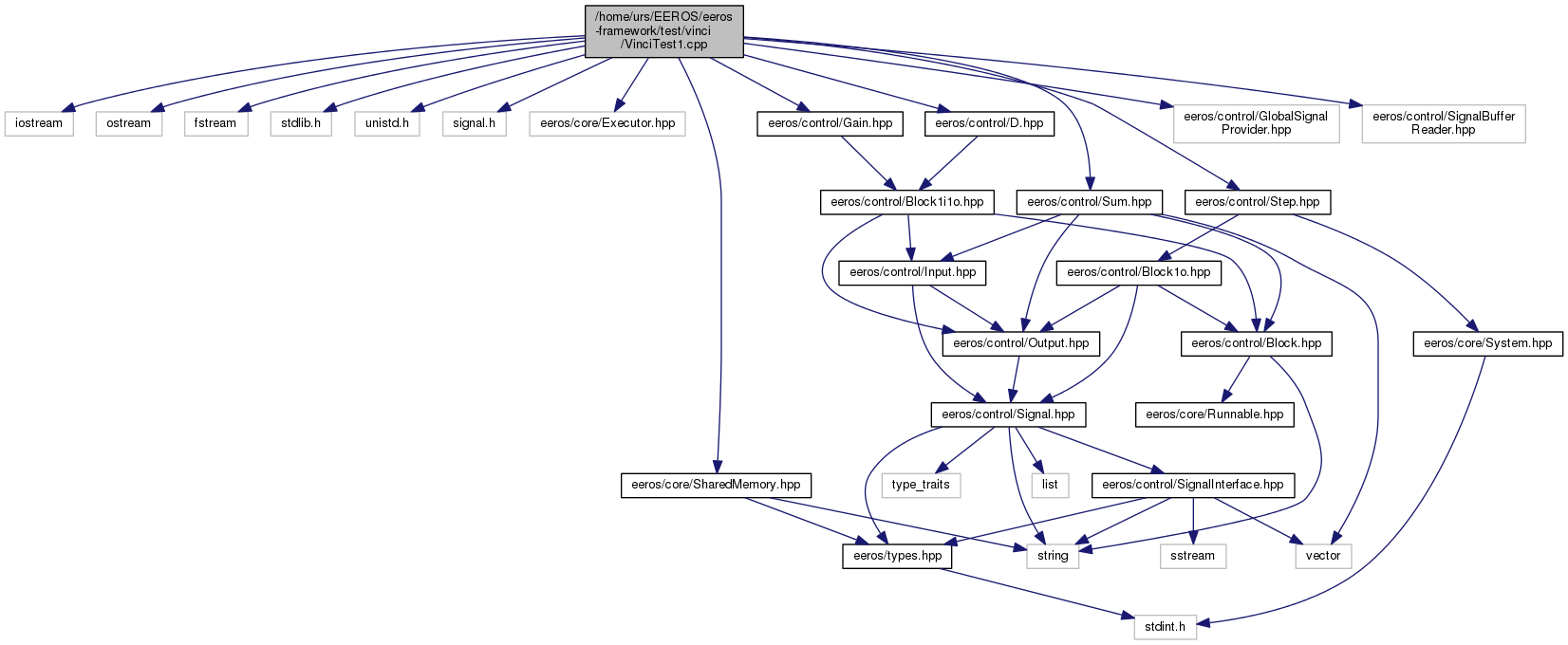
Classes | |
| class | eeros::test::vinci::Reader |
Namespaces | |
| eeros | |
| eeros::test | |
| eeros::test::vinci | |
Macros | |
| #define | TIMETOWAIT 30 |
Functions | |
| void | signal_callback_handler (int signum) |
| int | main () |
| #define TIMETOWAIT 30 |
| int main | ( | ) |
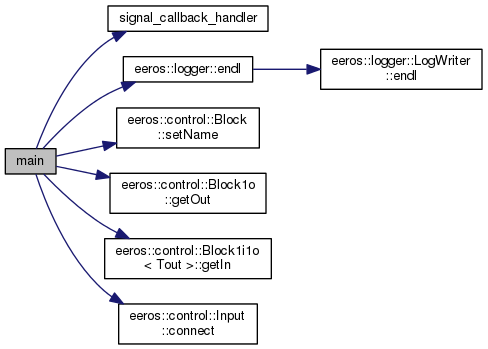
| void signal_callback_handler | ( | int | signum | ) |

 1.8.6
1.8.6 
